Hand Grip Dynamometer
Instrumentation, circuit design, calibration, and data analysis for a grip-force tester
Overview
Developed a hand grip dynamometer using a strain (string) gauge in a Wheatstone bridge, an AD623 instrumentation amplifier, and low-pass filtering to measure grip force with a stable, low-noise output. Included circuit design, calibration with known masses, and data analysis in MATLAB.
Specs
- Sensing: String gauge (120 Ω nominal, GF ≈ 2.1) in one bridge leg
- Amplification: AD623 instrumentation amplifier with RF = 200 Ω → gain ≈ 501; Vref = 2.5 V
- Filtering: Input capacitor across differential inputs and an RC output low-pass for noise suppression
Theory
The strain gauge produces a small change in resistance proportional to local strain. The Wheatstone bridge converts resistance change to a differential voltage amplified by the AD623. Gain: G = 1 + 10,000 / RF (RF = 200 Ω → G = 501). Vout is referenced to 2.5 V. Tuned cutoff ≈ 0.318 Hz.
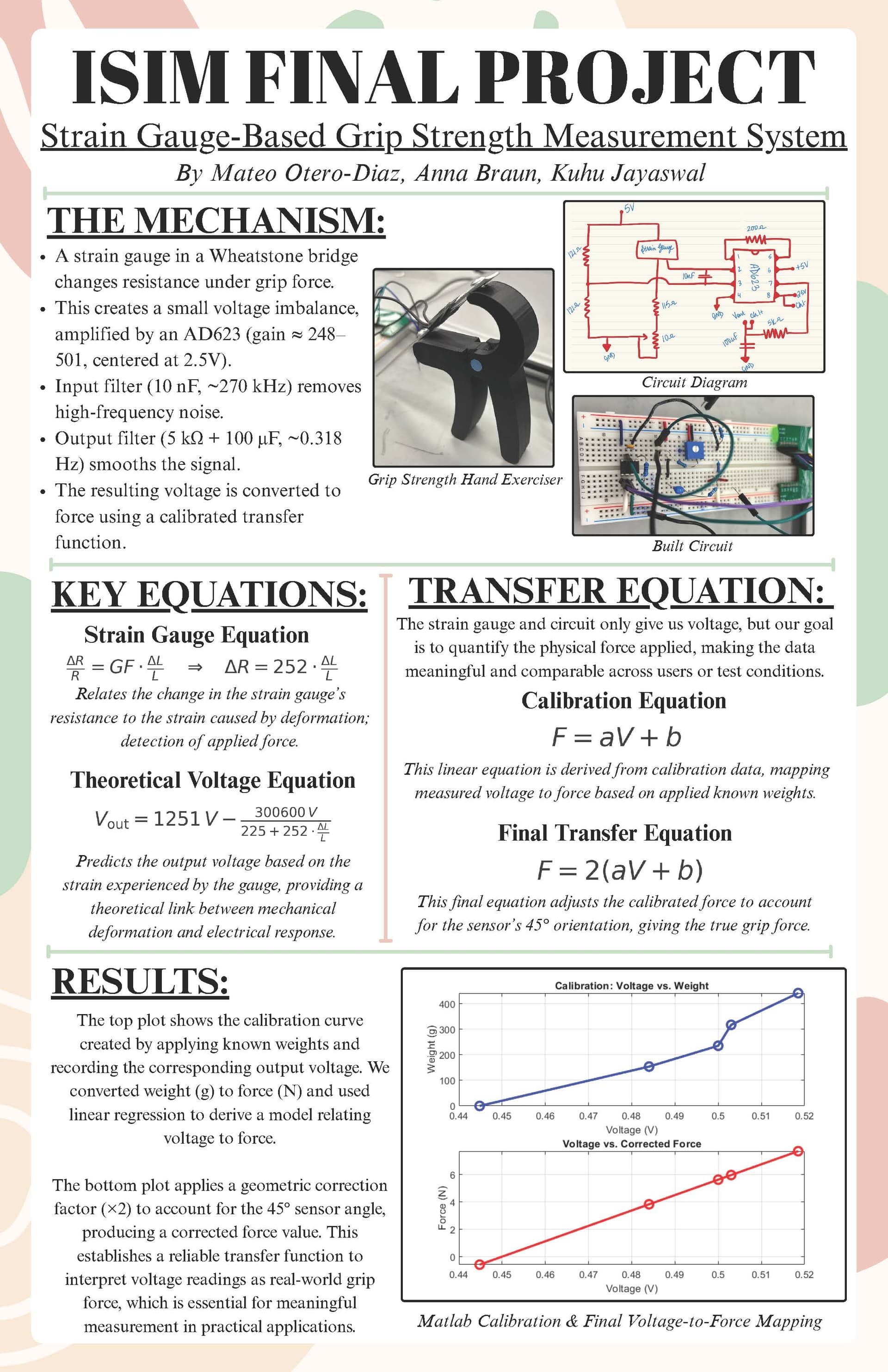
Calibration
Applied known masses, converted to force (F = m/1000 · 9.80665), recorded output voltage. Linear regression produced F = a·V + b. Geometric correction for sensor at 45°: F_true = 2·(a·V + b).
Final Measurement
Example: volunteer produced Vout = 2.92 V → computed grip force ≈ 277.4 N, consistent with expected ergonomic ranges.
Project Media